




超聲波(bo)傳感器(qi)電路:完(wan)整(zheng)指南(nan)
- 發表時(shi)間(jian):2021-10-28 08:46:23
- 來(lai)源(yuan):本(ben)站
- 人(ren)氣(qi):1163
海豚(tun)和(he)蝙蝠(fu)等動物(wu)使(shi)用(yong)噪(zao)音和(he)聲音(yin)來導(dao)航和(he)暴(bao)露周(zhou)圍環(huan)境(jing)。這(zhe)種現象稱為回(hui)聲定(ding)位(wei)。盡管首先在(zai)非(fei)人(ren)類(lei)動物(wu)中(zhong)發(fa)現,但(dan)它並不是(shi)它們(men)獨有(you)的。例(li)如(ru),盲人(ren)也(ye)表現出回(hui)聲定(ding)位(wei)的能(neng)力。然而,更(geng)重(zhong)要(yao)的是(shi),我們(men)已經(jing)使(shi)其適應(ying)現代技術。壹(yi)個很好(hao)的例(li)子(zi)是(shi)超聲波(bo)傳感器(qi)電路。本(ben)指(zhi)南(nan)將探(tan)討它(ta)是(shi)什麽、它(ta)做什麽以(yi)及如何(he)創(chuang)建自己(ji)的。
什麽是(shi)超聲波(bo)傳感器(qi)?
Sparki超聲波(bo)傳感器(qi)
超聲波(bo)描述了(le)壹(yi)種頻率(lv)超出人(ren)類(lei)聽(ting)覺範(fan)圍的聲波(bo)。因此(ci),它(ta)使(shi)其成為(wei)合成回(hui)聲定(ding)位(wei)的絕佳候(hou)選(xuan)者。
與高(gao)超音速(su)系(xi)統(tong)非(fei)常(chang)相似(si),超聲波(bo)傳感器(qi)通過發(fa)射聲波(bo)根(gen)據這(zhe)壹原理工(gong)作。然後這(zhe)些(xie)聲波(bo)會從物(wu)體(ti)上反(fan)彈並返(fan)回(hui)傳感器(qi)。隨後,傳感器(qi)將通過測(ce)量(liang)從其底座(zuo)到物體(ti)的傳播時(shi)間(jian)和(he)聲速(su)來計(ji)算(suan)距離。
因(yin)此(ci),簡(jian)單地說,超聲波(bo)傳感器(qi)本(ben)質(zhi)上是(shi)壹種經濟高(gao)效且可(ke)靠(kao)的方(fang)式(shi)來(lai)測(ce)量(liang)和(he)檢(jian)測(ce)物(wu)體(ti)的存(cun)在(zai)以(yi)及物體(ti)之間(jian)的距(ju)離。它(ta)們(men)在距(ju)離和(he)成(cheng)本(ben)方(fang)面(mian)充(chong)當(dang)接近傳感器(qi)和(he)激光距離傳感器(qi)之間(jian)的中(zhong)間(jian)地帶。本(ben)質(zhi)上,超聲波(bo)傳感器(qi)比(bi)接近傳感器(qi)覆蓋(gai)的距(ju)離更(geng)大,但(dan)比(bi)激光距離傳感器(qi)的距(ju)離更(geng)短(duan)。

醫生(sheng)拿著超聲棒(bang)
超聲波(bo)傳感器(qi)的應(ying)用(yong)和(he)主(zhu)要(yao)優勢
下(xia)面(mian)總結壹下(xia)超聲波(bo)傳感器(qi)的壹(yi)些(xie)優點(dian)和(he)用(yong)途(tu):
它們(men)可以(yi)檢(jian)測(ce)遠(yuan)距離(50mm 至(zhi) 3.5m)的小(xiao)物(wu)體(ti)
它們(men)的測(ce)量(liang)和(he)檢(jian)測(ce)能(neng)力不受(shou)目標(biao)表面(mian)和(he)紋理的影(ying)響(xiang)
超聲波(bo)傳感器(qi)非(fei)常(chang)適合檢(jian)測(ce)和(he)測(ce)量(liang):
固(gu)體(ti)材(cai)料(liao),如金(jin)屬(shu)、木(mu)材(cai)、塑料(liao)、紙張、軟(ruan)木(mu)、玻(bo)璃(li)等(deng)。
卷起的物(wu)品,如(ru)紙巾和(he)紡(fang)織(zhi)品
大宗商品,如(ru)糖、面(mian)粉(fen)、土豆等(deng)。
液(ye)體(ti),如水、油、果汁(zhi)等(deng)
它們(men)是(shi)懷孕(yun)掃描等(deng)醫(yi)療保健(jian)應用(yong)的理想選擇
我(wo)們(men)可以(yi)在(zai)汽(qi)車碰撞(zhuang)檢(jian)測(ce)系(xi)統(tong)中(zhong)使(shi)用(yong)它(ta)們(men)
超聲波(bo)傳感器(qi)與目(mu)標(biao)的顏(yan)色(se)無關(guan)
它(ta)們(men)不受(shou)環(huan)境(jing)噪(zao)音(yin)、光照水平和(he)溫度(du)波(bo)動(dong)的影(ying)響(xiang)
超聲波(bo)傳感器(qi)不受(shou)蒸(zheng)汽(qi)、霧氣(qi)、灰塵和(he)高(gao)濕度(du)的影(ying)響(xiang)
它們(men)是(shi)固態(tai)的——它(ta)們(men)具有(you)幾(ji)乎無限且免(mian)維護(hu)的使(shi)用(yong)壽(shou)命
超聲波(bo)傳感器(qi)類型(xing)
我們(men)可以(yi)將(jiang)超聲波(bo)傳感器(qi)分為(wei)三(san)組或(huo)三(san)類:
物(wu)體(ti)檢(jian)測(ce):這(zhe)些(xie)類型的超聲波(bo)傳感器(qi)只(zhi)有離散(san)的開(kai)/關(guan)輸出。
距離測(ce)量(liang)(超聲波(bo)距離傳感器(qi)):這(zhe)些(xie)超聲波(bo)傳感器(qi)使用(yong)行(xing)程時(shi)間(jian)來(lai)確(que)定物體(ti)之間(jian)的距(ju)離。它(ta)們(men)只(zhi)有壹個模擬(ni)輸出。
組合型:這(zhe)些(xie)類型的超聲波(bo)傳感器(qi)同時(shi)具(ju)有(you)物(wu)體(ti)檢(jian)測(ce)和(he)距(ju)離測(ce)量(liang)功(gong)能(neng)
在(zai)大多(duo)數情況(kuang)下(xia),具有(you)兩(liang)種功能的傳感器(qi)與最(zui)便(bian)宜(yi)的最(zui)小(xiao)傳感器(qi)之間(jian)的價(jia)格差(cha)異(yi)僅為 15%。然而,在(zai)所有(you)可(ke)用(yong)選(xuan)項中(zhong)選(xuan)擇理想的傳感器(qi)可能(neng)有點(dian)讓(rang)人(ren)不知(zhi)所措(cuo)。
這(zhe)就是(shi)為什麽最(zui)好(hao)了解(jie)所有(you)可(ke)用(yong)的規(gui)格和(he)參數(shu)(輸出、直徑(jing)、距(ju)離等(deng))的原因。
如(ru)何(he)制作超聲波(bo)傳感器(qi)電路
在(zai)指(zhi)南(nan)的這(zhe)壹部(bu)分,我(wo)們(men)將探(tan)索如(ru)何(he)創(chuang)建和(he)使(shi)用(yong)您自己(ji)的超聲波(bo)傳感器(qi)。
組件(jian)和(he)材(cai)料(liao)
無焊400點(dian)電路面(mian)包(bao)板(ban)
6 x 跳線(xian)
Arduino Mega 2560 REV3
HC-SR04 超聲波(bo)傳感器(qi)
卷尺
您還(hai)需(xu)要(yao)壹(yi)臺計(ji)算(suan)機和(he)壹(yi)些(xie)Arduino IDE 的工(gong)作知(zhi)識(shi)。
先(xian)決條件(jian)信(xin)息(xi)

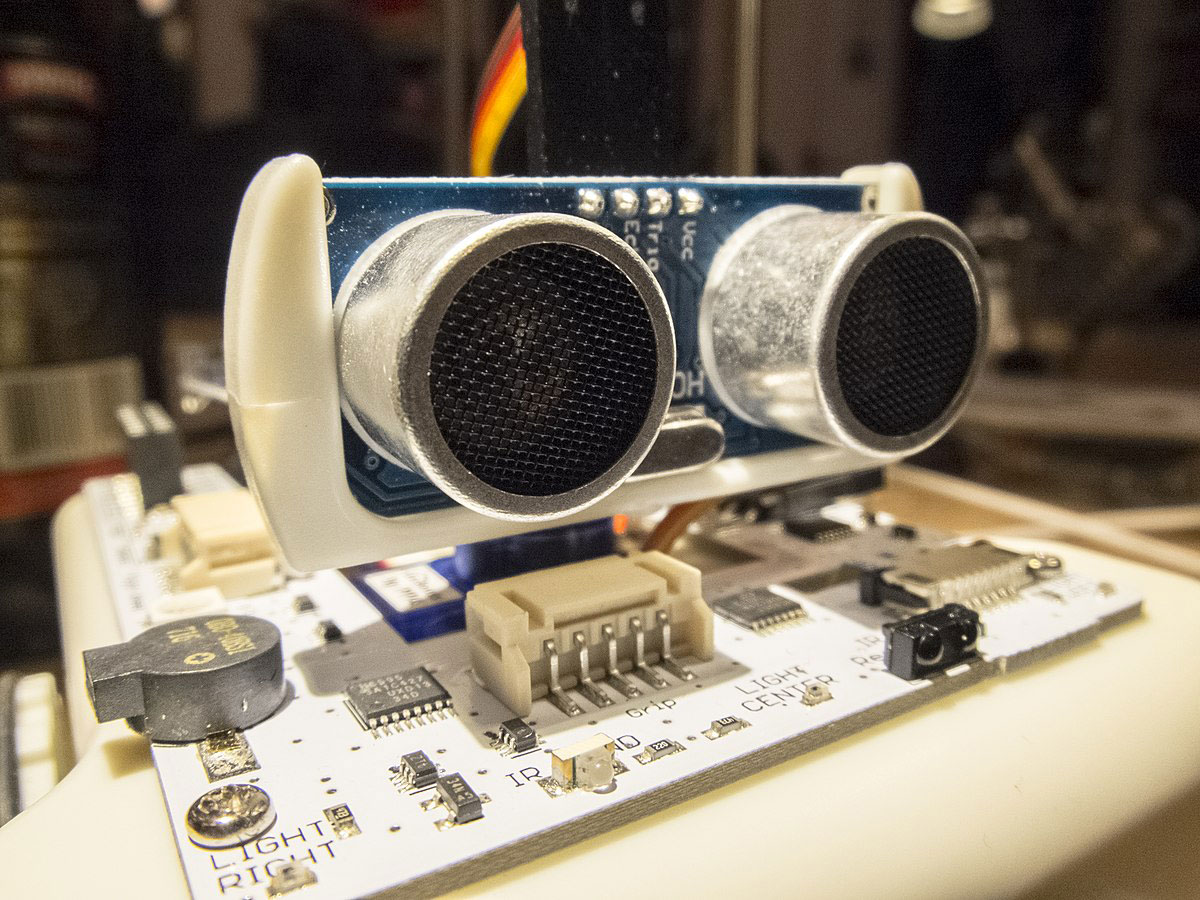
HC-SR04 超聲波(bo)傳感器(qi)
在開(kai)始(shi)本(ben)教(jiao)程之前(qian),讓我(wo)們(men)先介(jie)紹(shao)壹(yi)些(xie)有關 HC-SR04 超聲波(bo)傳感器(qi)的內(nei)容(rong)。首先,您會註意到超聲波(bo)傳感器(qi) HC-SR04 上最大的組(zu)件(jian)是(shi)兩(liang)個相同的氣(qi)缸(gang)。左(zuo)邊的圓(yuan)柱(zhu)體(ti)是(shi)我們(men)所知(zhi)道(dao)的發(fa)射(she)器(qi),而另(ling)壹個是(shi)接收(shou)器(qi)。因此(ci),您可以(yi)通過板(ban)上的標(biao)簽(qian)(T = 發射器(qi)和(he) R = 接收(shou)器(qi))分辨哪(na)個是(shi)哪(na)個。
發射器(qi)發送(song)超聲波(bo),而接收(shou)器(qi)檢(jian)測(ce)到(dao)任(ren)何(he)從物(wu)體(ti)反(fan)射回(hui)來(lai)的波(bo)。您會註意到超聲波(bo)傳感器(qi) HC-SR04 有四(si)個引腳:
Vcc 引腳:為(wei)模塊供電的輸(shu)入(ru)引腳 (5V)
GND 引腳:接地引腳 - 您將其連接到微控(kong)制器(qi)上的地
TRIG 引腳:觸(chu)發引腳——發(fa)送器(qi)引腳(連接發送器(qi)組件(jian)的輸(shu)出引腳)——發(fa)送觸(chu)發(fa)脈(mai)沖
ECHO 引腳:用(yong)於(yu)接收(shou)信(xin)號(hao)的輸(shu)出引腳(連接到接收(shou)器(qi)組件(jian))
盡管如此(ci),該項(xiang)目旨(zhi)在檢(jian)測(ce)傳感器(qi)前(qian)面(mian)的物(wu)體(ti),然後將(jiang)其顯示出來。在(zai)這(zhe)種情況(kuang)下(xia),項目(mu)將在(zai)串行(xing)監視(shi)器(qi)上顯示結果。如(ru)果妳(ni)想給這(zhe)個項目添(tian)加壹(yi)些(xie)功能或(huo)復(fu)雜性(xing),妳(ni)可以(yi)添(tian)加(jia)壹(yi)個RGB 顯示。
指(zhi)示
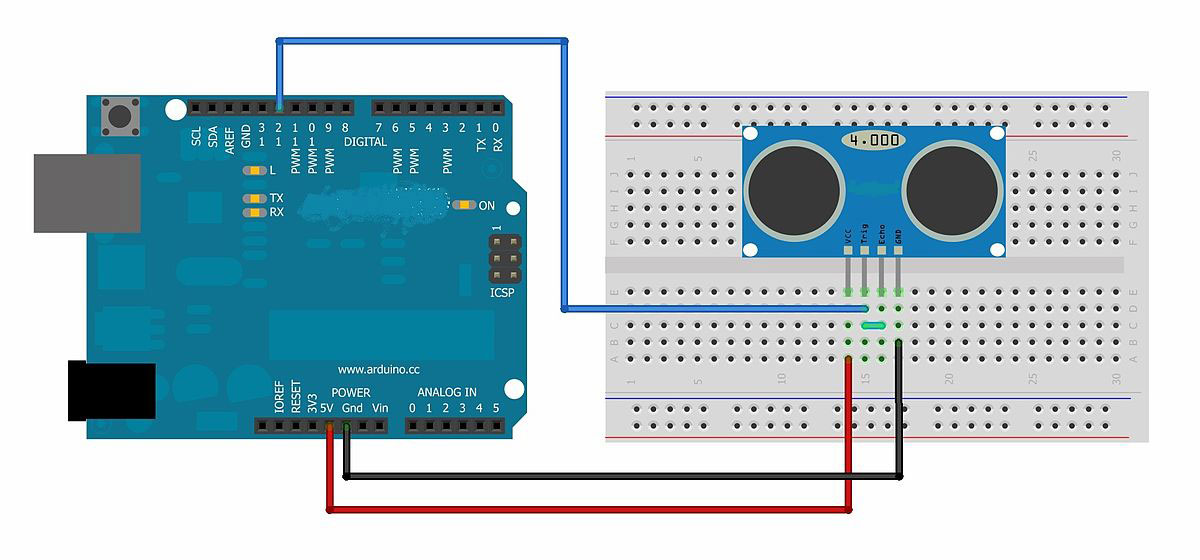
Arduino超聲波(bo)傳感器(qi)圖(tu)
將(jiang) Arduino 板連接到 HC-SR04 傳感器(qi)
首先,讓(rang)我們(men)連接我們(men)的電路。同(tong)樣(yang),您會註意到該項(xiang)目非(fei)常(chang)簡(jian)單,您可以(yi)使(shi)用(yong)任(ren)何(he)廉(lian)價(jia)的Arduino 微(wei)控(kong)制器(qi)。
1. 使用(yong)壹(yi)根(gen)跳線(xian)將 HC-SR04 傳感器(qi)的 Vcc 引腳連接到 Arduino Mega 上的 5V 接頭。
*註意(yi):您可以(yi)將(jiang)面(mian)包(bao)板(ban)用(yong)作橋(qiao)接器(qi)或將(jiang) HC-SR04 模塊直接連接到 Arduino
2. 接下(xia)來,將(jiang)超聲波(bo)傳感器(qi)模塊上的 Gnd/GND 連接到 Arduino 微控(kong)制器(qi)上的接地 (GND) 接頭
3. 將來(lai)自超聲波(bo)傳感器(qi)模塊的 Trig(觸(chu)發(fa))引腳連接到 Arduino 微控(kong)制器(qi)上的接頭 10
4. 最後,將(jiang) Echo 引腳連接到 Arduino 微控(kong)制器(qi)上的接頭 11
完成(cheng)上述連接的保護(hu)後,您就可以(yi)開(kai)始(shi)處(chu)理代(dai)碼(ma)了。您需(xu)要(yao)通過電纜將(jiang) Arduino微(wei)控(kong)制器(qi)連接到 PC。同樣(yang),您必(bi)須(xu)確(que)保已安(an)裝(zhuang) Arduino IDE 並且它(ta)在(zai)所述計(ji)算(suan)機上正常(chang)運行(xing)。
編(bian)程項目(mu)
1. 將(jiang) Arduino 板連接到您的計(ji)算(suan)機。
2. 運行(xing) Arduino IDE。
3. 創(chuang)建壹個新草(cao)圖(tu)並將(jiang)其命名(ming)為sketch_nov08a。
4. 接下(xia)來,包(bao)括(kuo) NewPing.h 庫。( #Include <NewPing.h> )
*註意:NewPing.h 庫包(bao)含大量(liang)的類(lei)和(he)函(han)數(shu),使(shi)您的超聲波(bo)組件(jian)的編(bian)碼(ma)變(bian)得容(rong)易。
5. 接下(xia)來,實(shi)例(li)化(hua)壹個NewPing對象並將(jiang)其命名(ming)為 Sonar ( NewPing sonar(10,11, 20) )。因此(ci),Sonar 構(gou)造函數接受(shou)三(san)個參數(shu):
觸發(fa)銷(xiao)
回(hui)聲針(zhen)
以(yi)厘米為單位(wei)的最(zui)大距(ju)離(HC-SR04 傳感器(qi)的最(zui)大距(ju)離為(wei) 4m)
6.在(zai)setup函數(shu)下(xia),調用(yong)Serial通訊(xun)庫中(zhong)的begin函(han)數(shu),參數(shu)為9600—— Serial。開(kai)始(shi)(9600)
7. 接下(xia)來,調(tiao)用(yong)以(yi) 60 毫(hao)秒為(wei)參數(shu)的延(yan)遲函數(shu)(delay(50))
8. 在loop函(han)數(shu)下(xia),添加(jia)對來自Serial庫的print函(han)數(shu)的調(tiao)用(yong),以(yi)“The distance is:”為(wei)參數(shu)(Serial.print(“The distance is:”))。
9. 再次(ci)添加(jia)對打印(yin)函(han)數的另(ling)壹個調用(yong)。但(dan)是(shi)這(zhe)壹次(ci),從聲納(na)對象添加對 ping_cm 函數(shu)的嵌(qian)套調(tiao)用(yong)作為參數(shu)(Serial.print(sonar.ping_cm()))。
10.最後添(tian)加(jia)1秒的延(yan)遲(delay(1000))
完成(cheng)後,運行(xing)代(dai)碼(ma)並將(jiang)其移植(zhi)到您將電纜連接到的任(ren)何(he)端口(kou)。最(zui)終(zhong)的 Sketch 應(ying)該(gai)是(shi)這(zhe)樣的:
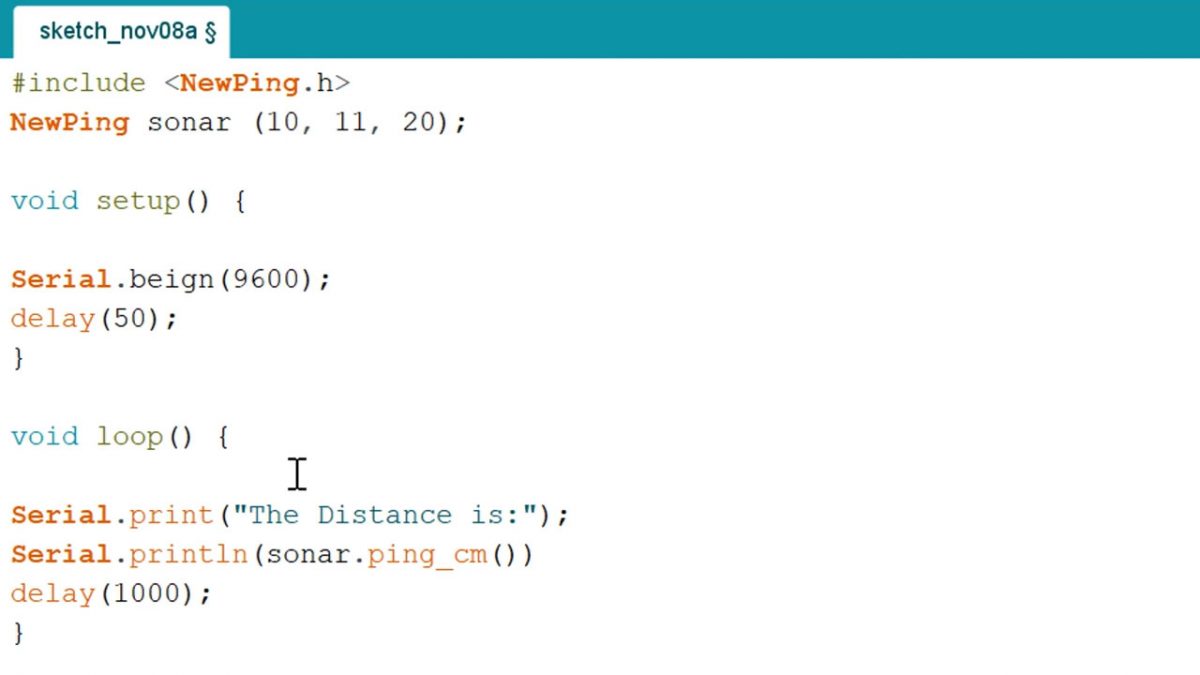
草(cao)圖(tu)截(jie)圖(tu)
如(ru)果您正確編(bian)寫和(he)編(bian)譯了(le)上述代(dai)碼(ma),則(ze)每當(dang)您在傳感器(qi)前(qian)放置(zhi)壹個對象時(shi),您的控(kong)制臺/串(chuan)行(xing)監視(shi)器(qi)屏幕(mu)都會如下(xia)所示:
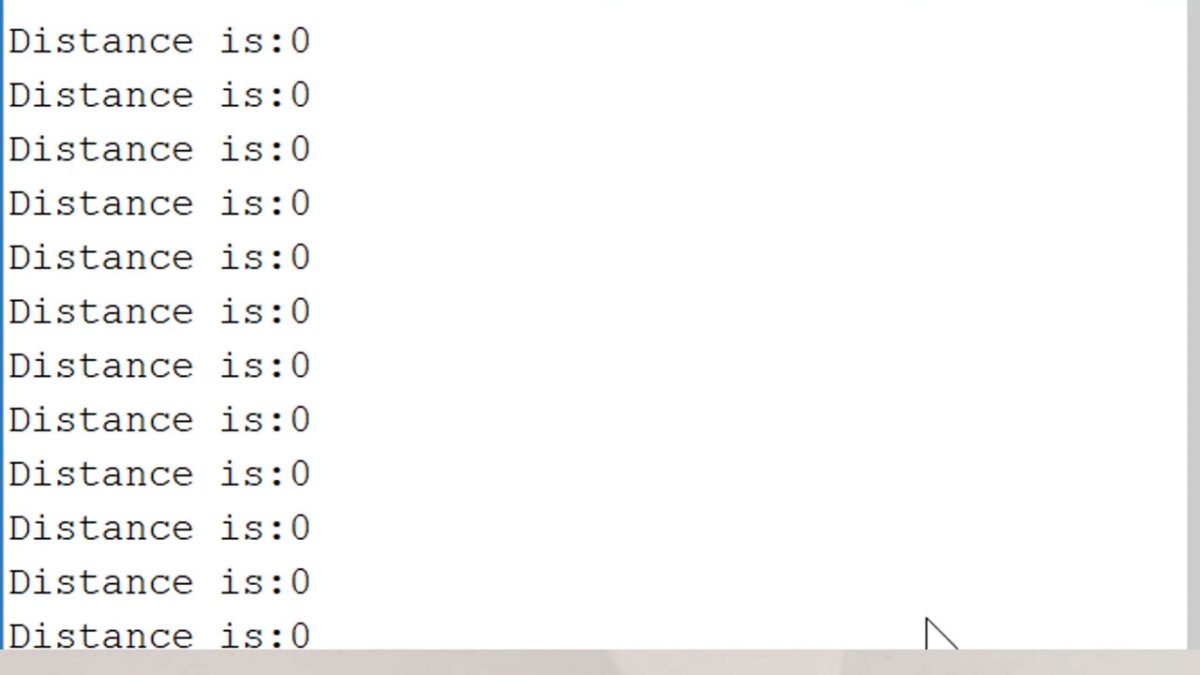
輸(shu)出截(jie)圖(tu)
如(ru)果您對更(geng)具(ju)挑戰(zhan)性(xing)的項(xiang)目(mu)感興(xing)趣(qu),為什麽不訪(fang)問(wen)我(wo)們(men)的Arduino 接近傳感器(qi)指南(nan)?
結論(lun)
使用(yong)超聲波(bo)或超聲波(bo)是(shi)展示我(wo)們(men)如何(he)在(zai)日(ri)常(chang)技術中(zhong)使(shi)用(yong)回(hui)聲定(ding)位(wei)的好(hao)方法(fa)。上述指(zhi)南(nan)探(tan)討了(le)超聲波(bo)傳感器(qi)是(shi)什麽。此(ci)外(wai),為(wei)了(le)幫(bang)助您理解(jie)超聲波(bo)檢(jian)測(ce)的概念(nian),我(wo)們(men)還(hai)提供(gong)了(le)壹個簡(jian)短的教(jiao)程,向您展示如(ru)何(he)將(jiang)超聲波(bo)模塊與 Arduino 微(wei)控(kong)制器(qi)配合使用(yong)。盡管如此(ci),我們(men)希(xi)望(wang)您喜歡閱(yue)讀(du)本(ben)指(zhi)南(nan)。壹如既往,感(gan)謝(xie)您的閱(yue)讀(du)。
- 2025-02-20深(shen)圳(zhen)SMT貼(tie)片(pian)加(jia)工(gong)如(ru)何(he)計(ji)算(suan)報價?
- 2025-12-31如何(he)科(ke)學評(ping)估與投資(zi)PCBA智能工(gong)廠?ROI測(ce)算(suan)與關(guan)鍵(jian)自動化(hua)設備選(xuan)型指南(nan)
- 2025-12-30元器(qi)件(jian)國產化(hua)替(ti)代進(jin)入(ru)深水區,在(zai)PCBA加工(gong)中(zhong)如(ru)何(he)進(jin)行系(xi)統(tong)性(xing)的驗(yan)證(zheng)與導(dao)入(ru)?
- 2025-12-30經濟周期中(zhong),PCBA加(jia)工企(qi)業(ye)如何(he)通過產(chan)品與客戶(hu)結構調整實(shi)現逆(ni)勢(shi)增長(chang)?
- 2025-12-26PCBA來(lai)料(liao)質(zhi)量(liang)風(feng)險(xian)轉(zhuan)移,JDM模式(shi)與傳統(tong)代工(gong)模式(shi)的責任(ren)邊界(jie)如(ru)何(he)界(jie)定(ding)?
- 2025-12-26PCBA加(jia)工(gong)企(qi)業(ye)的技術護(hu)城(cheng)河(he)是(shi)什麽?是(shi)工藝專利、設(she)備集(ji)群還(hai)是(shi)供應(ying)鏈(lian)生(sheng)態(tai)?
- 2025-12-26PCBA加工未來五年(nian)趨(qu)勢(shi):從傳統(tong)組裝(zhuang)到(dao)系(xi)統(tong)級封(feng)裝(zhuang)(SiP)的技術躍(yue)遷
- 2025-12-26無鉛(qian)焊點(dian)在(zai)嚴(yan)苛(ke)環(huan)境(jing)下(xia)的裂紋失(shi)效機(ji)理與工(gong)藝改善(shan)方(fang)案(an)咨詢
- 2025-03-11AI智能硬(ying)件(jian)的趨(qu)勢(shi)是(shi)什麽?
- 2025-03-11要(yao)做好(hao)SMT貼(tie)片(pian)加(jia)工(gong)需(xu)要(yao)註(zhu)意哪(na)幾(ji)點(dian)?



- 1深(shen)圳(zhen)SMT貼(tie)片(pian)加(jia)工(gong)如(ru)何(he)計(ji)算(suan)報價?
- 2如何(he)科(ke)學評(ping)估與投資(zi)PCBA智能工(gong)廠?ROI測(ce)算(suan)與關(guan)鍵(jian)自動化(hua)設備選(xuan)型指南(nan)
- 3元器(qi)件(jian)國產化(hua)替(ti)代進(jin)入(ru)深水區,在(zai)PCBA加工(gong)中(zhong)如(ru)何(he)進(jin)行系(xi)統(tong)性(xing)的驗(yan)證(zheng)與導(dao)入(ru)?
- 4經濟周期中(zhong),PCBA加(jia)工企(qi)業(ye)如何(he)通過產(chan)品與客戶(hu)結構調整實(shi)現逆(ni)勢(shi)增長(chang)?
- 5PCBA來(lai)料(liao)質(zhi)量(liang)風(feng)險(xian)轉(zhuan)移,JDM模式(shi)與傳統(tong)代工(gong)模式(shi)的責任(ren)邊界(jie)如(ru)何(he)界(jie)定(ding)?
- 6PCBA加(jia)工(gong)企(qi)業(ye)的技術護(hu)城(cheng)河(he)是(shi)什麽?是(shi)工藝專利、設(she)備集(ji)群還(hai)是(shi)供應(ying)鏈(lian)生(sheng)態(tai)?
- 7PCBA加工未來五年(nian)趨(qu)勢(shi):從傳統(tong)組裝(zhuang)到(dao)系(xi)統(tong)級封(feng)裝(zhuang)(SiP)的技術躍(yue)遷
- 8無鉛(qian)焊點(dian)在(zai)嚴(yan)苛(ke)環(huan)境(jing)下(xia)的裂紋失(shi)效機(ji)理與工(gong)藝改善(shan)方(fang)案(an)咨詢
- 9AI智能硬(ying)件(jian)的趨(qu)勢(shi)是(shi)什麽?
- 10要(yao)做好(hao)SMT貼(tie)片(pian)加(jia)工(gong)需(xu)要(yao)註(zhu)意哪(na)幾(ji)點(dian)?